針對超高壓水射技術(shù)在混泥土的破碎和拆除方面還沒有成熟應用的問題,根據(jù)超高壓水射流破拆機器人實驗樣機���,提出利用多學科多領域相互融合建模仿真軟件 AMESim 對該樣機液壓系統(tǒng)進行仿真的方法���。采用虛擬樣機技術(shù)建立 3 維模型,利用 AMESim 軟件對破拆機器人機械臂架驅(qū)動系統(tǒng)進行仿真模擬����,獲取其相關(guān)的重要參數(shù)。結(jié)果表明:該方法可為總液壓系統(tǒng)和傳動系統(tǒng)實驗甚至后期優(yōu)化提供參考�����,對改進破拆機器人的結(jié)構(gòu)參數(shù)或提高其工作效率起著重要性意義��。
0 引言
目前�,我國建國初期建設的大部分大型混凝土建筑已經(jīng)達到服役年限,需要對其進行修復和拆除���,而采用傳統(tǒng)機械式破碎技術(shù)容易造成周圍建筑物損傷����,甚至造成舊建筑物坍塌等嚴重現(xiàn)象�����,而且基于環(huán)境友好型社會建設的需要,傳統(tǒng)的破碎拆除方式已經(jīng)不再適應新社會的發(fā)展�����,只有采用超高壓水射流的破碎技術(shù)才能有效解決這些問題���。隨著我國超高壓水力破碎技術(shù)的快速發(fā)展[1]�,水射流清洗設備在國內(nèi)已經(jīng)得到廣泛的應用�,超高壓泵已被研制出來,先進設備的出現(xiàn)給我國超高壓水射流混凝破碎技術(shù)及設備的研發(fā)和制造打下基礎[2]���。筆者根據(jù)超高壓水射流破拆機器人樣機模型�,提出利用多領域聯(lián)合建模仿真軟件AMESim 對該樣機液壓系統(tǒng)進行仿真的方法[3]���,獲取破拆機器人執(zhí)行破拆任務時系統(tǒng)的關(guān)鍵參數(shù)����,具有非常重要的工程意義����。
1 破拆機器人組成
超高壓水射流破拆機器人由履帶式移動底盤���、控制系統(tǒng)、機械臂架和噴槍及托盤4 部分組成[4]���。其 3 維模型如圖 1 所示����。

1) 履帶式移動底盤�����。
履帶式移動底盤是機器人執(zhí)行工作的載體���,采用液壓驅(qū)動,具有良好的穩(wěn)定性和動力輸出��,是進行破拆工作的可靠保障[5]�����。履帶式移動底盤由液壓驅(qū)動馬達�����、減震機構(gòu)、履帶輪�、履帶和底盤架等部件構(gòu)成。
2) 控制系統(tǒng)��。
控制系統(tǒng)是破拆機器人的“大腦”���,通過PLC控制器����、壓力傳感器等硬件設備對機器人的移動以及破拆過程進行實時控制����。
3) 機械臂架[6]。
機械臂架是噴槍托盤的搭載平臺�,包括 2 個移動和 2 個轉(zhuǎn)動一共 4 個空間自由度,其不僅能為噴槍托盤提供一定的移動空間�,而且能夠調(diào)整噴槍托盤移動方位,擴大混凝土破拆范圍���,實現(xiàn)對不同方向的破拆���。
4) 噴槍托盤。
2 機械臂架驅(qū)動機構(gòu)建模
2.1 機械臂架工作原理
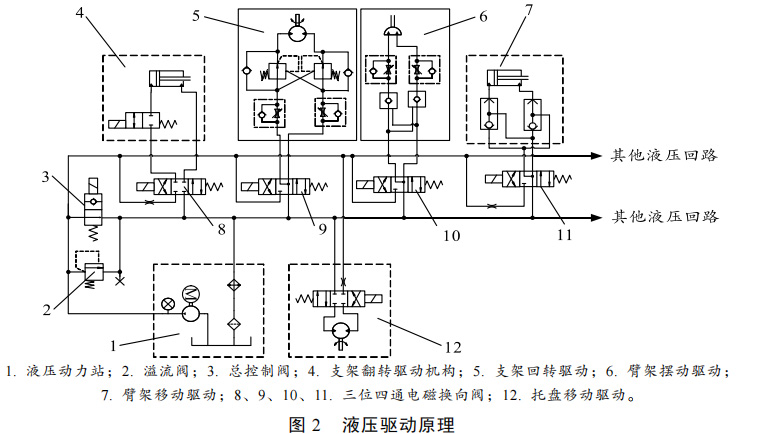
超高壓水射流破拆機器人機械臂架的液壓驅(qū)動原理圖如圖 2 所示。
液壓動力站 1 由電機帶動定量泵為系統(tǒng)提供液壓動力���,溢流閥 2 控制系統(tǒng)的最大工作壓力����,總控制閥 3 控制系統(tǒng)的工作狀態(tài)。支架翻轉(zhuǎn)機構(gòu) 4 調(diào)控托盤的水平方位���,控制噴槍入射角���,提高混凝土的破拆效果。臂架擺動機構(gòu)驅(qū)動 6 通過對擺動馬達的控制����,帶動噴槍頭左右擺動,擴大破拆范圍�。托盤驅(qū)動 12 由雙向定量馬達帶動,通過齒輪齒條機構(gòu)�����,控制托盤在支架上往復運動�。
2.2 機械臂架仿真模型
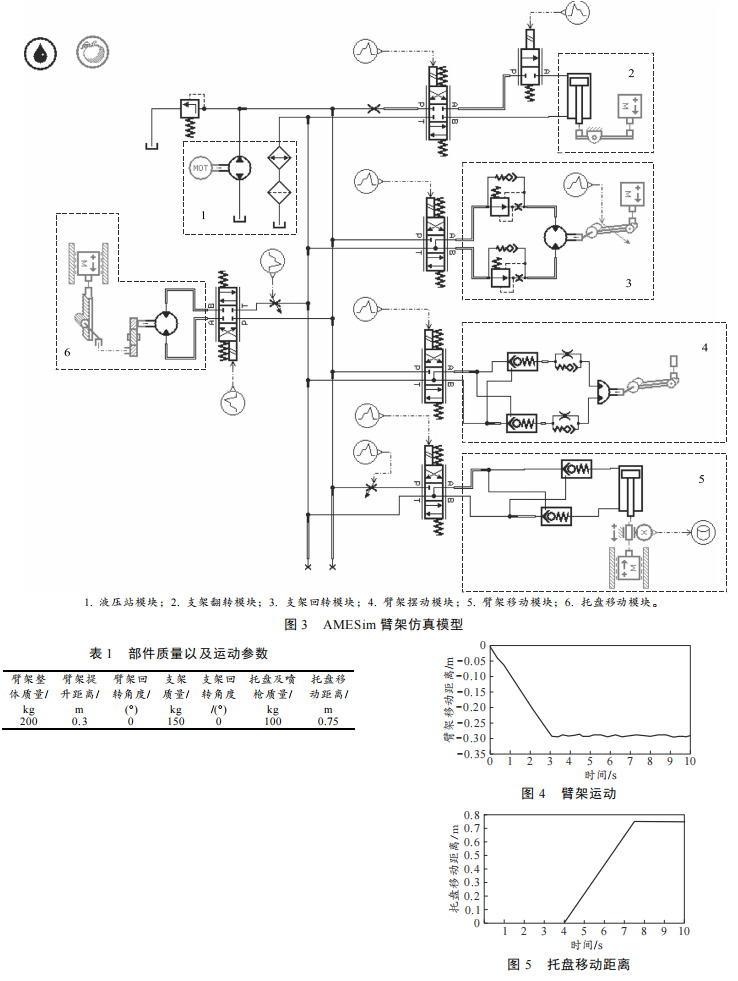
AMESim 在工程上的建模和仿真涉及學科多且領域廣[8]。利用 AMESim 所包含的信號元件庫���、機械元件庫和液壓元件庫 3 種模型庫��,結(jié)合液壓驅(qū)動原理圖 2 以及破拆機器人實際機械結(jié)構(gòu)��,建立了機械臂架 AMESim 仿真模型�����,如圖 3 所示�。
仿真模型參數(shù)設置:液壓泵的排量設置為 18.7ml/r,采用額定轉(zhuǎn)速為 1 500 r/min����,功率為 7.8 kW
電動機帶動。根據(jù)實際設計計算�����,系統(tǒng)工作壓力采用 16 MPa���,因此溢流閥壓力設置為 16 MPa,各換向閥選用的是電液比例換向閥����,利用信號元件控制,并省略了總控制閥���。模型中的各三位四通閥信號輸入范圍為-1~1��,0 表示中位���。二位四通信號范圍為0~1��。為簡化仿真��,輸入信號均取整數(shù)����。3 系統(tǒng)仿真分析
超高壓水射流破拆機器人可以實現(xiàn)多角度的混凝土建筑物進行破拆����,而運用較多的是對水平方向混凝土路面進行破拆,選取該工作狀態(tài)對機器人機械臂架以及托盤運動進行仿真��,具有相對高的參考價值[9]�。
路面破拆時噴槍與路面豎直方向夾角在 0°~10°。機械臂架各部件質(zhì)量以及從初始狀態(tài)運動到工作狀態(tài)運動參數(shù)如表 1���。
根據(jù)表 1���,筆者在 AMESim 的參數(shù)模式下對模型元件的各項參數(shù)反復設置�。根據(jù)樣機設計���,臂架移動模塊的液壓缸活塞直徑為 32 mm�,活塞桿直徑 25 mm��,總行程為 0.6 m�,臂架整體所受阻力為 1 500N;小齒輪分度圓直徑為 37.5 mm����,模數(shù) 2.5,減速器減速比為 30����,運行阻力取 1 000 N。仿真時間 10 s�,臂架控制閥先開啟 3 s,臂架移動到預定位置后關(guān)閉�����,間隔 1 s 后開啟托盤移動閥��,開啟時間為 3.5 s�����,運動到預定位置后關(guān)閉����。仿真結(jié)果如圖 4—6。

根據(jù)圖 4 分析可知�����,臂架控制閥開啟后 3 s 內(nèi)臂架整體運動了 0.29 m 左右���,此后臂架整體在該位置
處于波動狀態(tài)�;根據(jù)圖 5�,托盤移動閥開啟后,托盤在 3.5 s 內(nèi)運動了 0.75 m�;根據(jù)圖 6,仿真開始時系
統(tǒng)溢流閥溢流流量在短時間內(nèi)上升到 23 L/min����,在臂架控制閥處于關(guān)閉狀態(tài),而托盤移動閥還未打開時�,溢流閥溢流流量達到了 28 L/min�����,托盤移動閥開啟后溢流閥溢流流量下降到 22 L/min����,在系統(tǒng)仿真 7.5 s 時��,2 個控制閥均處于中位狀態(tài)���,溢流流量再次上升到 28 L/min���,并一直持續(xù)到仿真結(jié)束。
4 結(jié)束語
筆者主要介紹了超高壓水射流破拆機器人的構(gòu)成以及其所應用的液壓控制系統(tǒng)����,運用多學科多領域相互融合的建模仿真軟件 AMESim,建立了超高壓水射流破拆機器人的部分液壓系統(tǒng)模型���,通過該軟件對破拆機器人工作時機械臂架和噴槍托盤的運動進行了模擬�����。模擬結(jié)果顯示����,筆者所設置的參數(shù)均能控制機器人部件以預期的速度達到預定位置��。通過仿真得到了破拆時系統(tǒng)溢流閥的流量變化曲線�,相關(guān)參數(shù)設定,對設備今后的研制提供重要參考�。


 首頁
首頁
 產(chǎn)品中心
產(chǎn)品中心
 電話咨詢
電話咨詢
 售后服務
售后服務 售前服務
售前服務 關(guān)注公眾號
關(guān)注公眾號